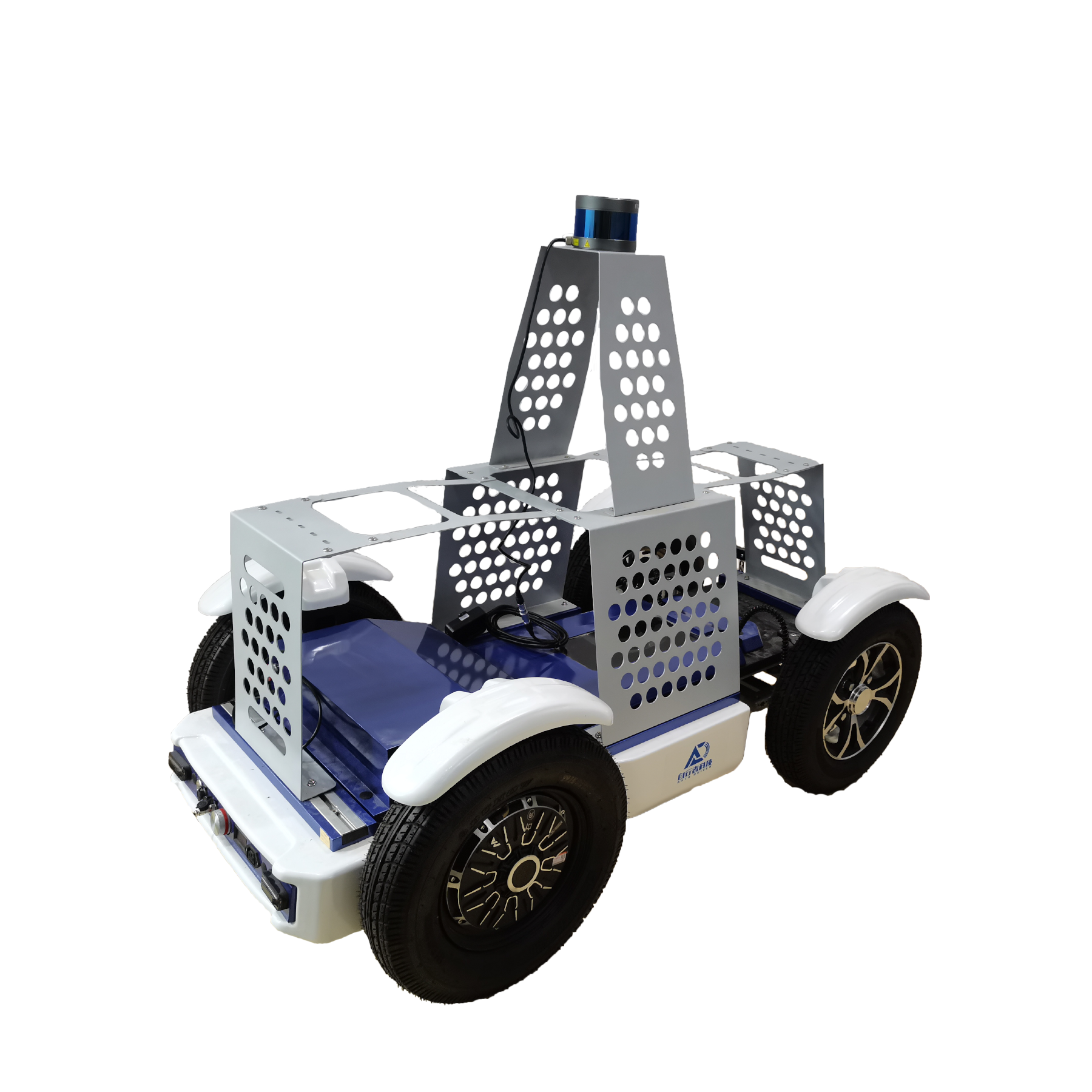
功能介绍
1. 我司对开源自动驾驶百度Apollo框架和日本名古屋大学的Autoware框架均有深入理解,并在此基础上有我们自主知识产权的核心算法包;
2. 配备建图、导航、循迹等相关实训操作指南;
3. 对教师进行一对一培训,从C++,Linux系统,ROS通信机理,自动驾驶算法框架,路径规划算法,3维点云SLAM算法等详细进行讲解;
4. 本平台可以支撑自动驾驶技术课程的教学。
扫一扫 在手机上阅读
车载总线与线控底盘实训平台
自动驾驶线控实车
智能汽车环境感知实训平台
车载传感器串口调试助手(高波特率)
长按屏幕识别二维码
打开手机扫描二维码